Introduction
Interrupts in Embedded Systems : An interrupt is a way for hardware or software to get the processor’s attention when something important happens. It’s like someone tapping you on the shoulder while you are busy working, saying, “Hey, look at this right now!”
When an interrupt happens, the processor doesn’t stop immediately. It first finishes the instruction it is currently working on. After that, it quickly moves to a special piece of code called the Interrupt Service Routine (ISR) or Interrupt Handler.
The ISR is like a small program that tells the processor what to do when a specific interrupt occurs. For example, if you press a button connected to your device, the processor will run the ISR to check which button was pressed and what action should be taken.
In the world of embedded systems, interrupts are powerful tools that help a device respond quickly to important events. Instead of constantly checking (polling) whether something has happened, interrupts alert the processor immediately, saving time and power.
What is an Interrupt?
An interrupt is a signal that pauses the normal flow of a program and forces the CPU to run a special piece of code called an Interrupt Service Routine (ISR).
After the ISR finishes, the CPU resumes its previous work as if nothing happened.
In simple words:
An interrupt is like someone tapping your shoulder to get your attention while you are busy working.
Why are Interrupts Important?
Interrupts offer several benefits in embedded systems:
- Real-time Response: Immediate reaction to critical events like button presses, sensor readings, or incoming data.
- Efficiency: No need to waste CPU time constantly checking for events.
- Power Saving: Processor can stay in low-power modes and wake up only when needed.
- Multitasking: Perform multiple tasks effectively without missing important signals.
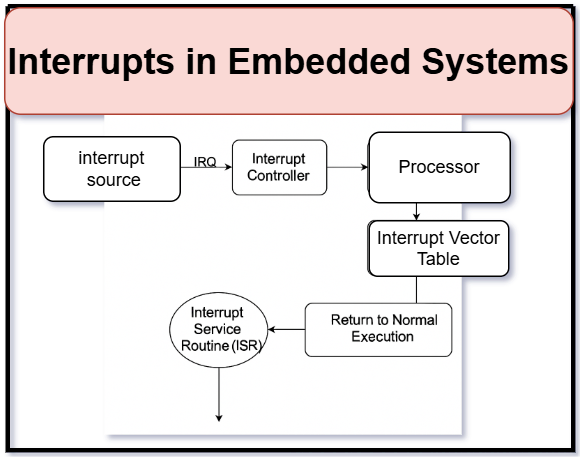
How Interrupts Work: Step-by-Step
Here’s a simple flow of how interrupts work:
- Normal Execution: CPU is busy running the main program.
- Interrupt Event: An external or internal event occurs (like a button press).
- Interrupt Request: The event triggers an interrupt request to the CPU.
- Interrupt Handling:
- CPU pauses the main program.
- CPU saves the current program state (so it can return later).
- CPU jumps to the Interrupt Service Routine (ISR).
- ISR Execution: Special code in ISR runs to handle the event.
- Return to Main Program: CPU restores the saved state and continues where it left off.
Real-World Example of Interrupt
Imagine a smart doorbell:
- Normally, the microcontroller is managing Wi-Fi or saving battery in sleep mode.
- When a visitor presses the doorbell button, it sends an interrupt.
- The microcontroller wakes up immediately and rings the chime or sends a notification.
Without interrupts, the microcontroller would have to keep checking the button all the time, wasting energy.
Key Components of an Interrupt System
- Interrupt Request (IRQ): The signal that notifies the CPU about an event.
- Interrupt Vector Table (IVT): A table that holds the addresses of all ISRs.
- Interrupt Service Routine (ISR): A short program that handles the interrupt.
- Interrupt Controller: Manages multiple interrupts and prioritizes them if needed.
Simple Code Example (Pseudocode)
#include <some_microcontroller_library.h>
// Define Interrupt Service Routine
void button_press_ISR(void) {
// Code to handle button press
turnOnLED();
}
int main() {
setupButtonInterrupt(button_press_ISR); // Link ISR to button press
while (1) {
// Main program continues
doOtherTasks();
}
}
Explanation:
setupButtonInterrupt()configures the button to generate an interrupt.- When the button is pressed,
button_press_ISR()runs. - The main program (
doOtherTasks()) keeps working without constantly checking the button.
Best Practices When Using Interrupts
- Keep ISR Short: The interrupt service routine should be as fast as possible.
- Avoid Heavy Operations: No complex calculations or long delays inside the ISR.
- Protect Shared Data: Use techniques like disabling interrupts or using volatile variables when accessing shared data.
- Set Priorities Wisely: If multiple interrupts can occur, assign proper priorities.
Types of Interrupts
Interrupts are mainly divided into two big categories:
- Hardware Interrupts
- Software Interrupts
And under these, there are some more types based on behavior.
Let’s dive into each of them :
1. Hardware Interrupts
Definition:
Hardware interrupts are triggered by external hardware devices like a keyboard, mouse, sensor, timer, or network card.
Example:
- Pressing a key on the keyboard
- Clicking a mouse
- Receiving data from a sensor
When these hardware components want CPU attention, they send a signal to the CPU — “Hey, I need you now!”
Types inside hardware interrupts:
a) Maskable Interrupt
- Meaning:
These are interrupts that can be ignored (masked) by the CPU if needed. - Example:
- You have a low-priority temperature sensor reading.
CPU may postpone or disable it temporarily if a higher-priority task is running.
- You have a low-priority temperature sensor reading.
- Real use:
Useful for less urgent tasks.
b) Non-Maskable Interrupt (NMI)
- Meaning:
These interrupts cannot be ignored by the CPU. They are critical. - Example:
- Hardware failure like memory errors
- Power failure warning
- Real use:
To handle very serious issues that must be fixed immediately to prevent damage.
2. Software Interrupts
Definition:
Software interrupts are triggered by programs or instructions inside the CPU — not by external hardware.
Example:
- A program might intentionally request a service from the operating system, like asking to print a document 🖨️.
How it works:
The software uses a special instruction (often called INT) to generate an interrupt.
Real-world Example:
- A C program calling an operating system function like
printf()indirectly uses a software interrupt to talk to the printer or screen.
Special Classifications
Apart from the basic two types, interrupts are often further classified based on how they are handled:
3. Synchronous Interrupts
- Meaning:
Happen at predictable times, usually caused by the instruction flow of the program. - Example:
- Division by zero error (mathematical mistake)
- Invalid memory access (segmentation fault)
- Real use:
Catching software bugs or errors.
4. Asynchronous Interrupts
- Meaning:
Happen at unpredictable times, triggered by external hardware. - Example:
- User pressing a keyboard key at any moment.
- Receiving network data.
- Real use:
Handling random real-world events.
5. Vectored Interrupts
- Meaning:
CPU knows exactly where the Interrupt Service Routine (ISR) is located — because the address is predefined. - Example:
- In ARM Cortex-M processors, vector tables store all ISR addresses.
- Real use:
Faster because CPU jumps directly to the correct code.
6. Non-Vectored Interrupts
- Meaning:
CPU does not know directly where to go — it must find the ISR address first. - Example:
- Older systems using interrupt controllers.
- Real use:
Slower but more flexible for dynamic interrupt management.
Quick Summary Table
| Type of Interrupt | Triggered By | Can Be Masked? | Predictability |
|---|---|---|---|
| Hardware Interrupt | External device | Maskable/Non-Maskable | Asynchronous |
| Software Interrupt | Software program | Generally Maskable | Synchronous |
| Synchronous Interrupt | Program execution | Depends | Predictable |
| Asynchronous Interrupt | External event | Depends | Unpredictable |
| Vectored Interrupt | Predefined address | – | Fast access |
| Non-Vectored Interrupt | Dynamic address | – | Slower |
Final Picture
Think of interrupts like urgent notifications in your phone:
- 🛎️ Hardware interrupts = Phone call from someone (external event)
- 🛎️ Software interrupts = Reminder set by yourself (internal event)
- 🔕 Maskable = You can put it on silent
- 🔔 Non-Maskable = Emergency call — can’t ignore
- 📍 Vectored = Direct link to caller
- 🔍 Non-Vectored = You have to search who’s calling first
What is an Interrupt Service Routine (ISR)?
Imagine you are watching your favorite TV show and suddenly your phone rings.
You pause the show, answer the call, finish talking, and then return to watching the show.
This is exactly what an interrupt is in a microcontroller!
- The TV show = Main program running normally
- Phone call = Interrupt (something urgent needing immediate attention)
- Answering the call = Executing the Interrupt Service Routine (ISR)
- Returning to TV = Going back to the main program after handling the interrupt
In technical words:
An interrupt is a signal that temporarily stops the main program and forces the microcontroller to do something else immediately.
When an interrupt happens, the microcontroller needs to know:
- What to do?
- Which code to run?
The special piece of code that runs when an interrupt occurs is called the Interrupt Service Routine (ISR).
➡️ In short:
ISR = A function that is automatically called when an interrupt happens.
How Does the Microcontroller Know Which ISR to Run?
Every interrupt has a fixed place in memory where the microcontroller looks to find the address of the ISR.
This fixed list of addresses is called the Interrupt Vector Table.
- Think of it like an emergency contact list.
- Each type of interrupt (like Timer, UART, External Pin) has its own slot in this table.
- The table points to the correct ISR for that interrupt.
So, Interrupt Vector Table = List of addresses that point to ISRs.
Step-by-Step Flow of What Happens During an Interrupt:
- Interrupt Occurs
(Example: A timer overflow, a button press, or a sensor signal) - Microcontroller Pauses Main Program
(It saves where it was in the main code.) - Microcontroller Looks at Interrupt Vector Table
(Finds the address of the ISR.) - Microcontroller Jumps to the ISR
(Starts executing the interrupt service routine.) - ISR Executes
(Handles the emergency or event.) - Return to Main Program
(After ISR finishes, the microcontroller goes back exactly where it left off.)
Important Points About ISRs
- Fast and Short: ISRs should be quick. Don’t put slow operations inside ISR.
- No Return Value: ISRs usually do not return any value.
- Special Syntax: In some programming languages (like C), you have to tell the compiler that a function is an ISR (using special keywords or attributes).
- Global Variables: If you change variables inside an ISR, be careful — you might need to use
volatilekeyword.
Real Life Example
Suppose you have a doorbell system:
- The microcontroller is busy displaying the time on a screen.
- When someone presses the doorbell button, it triggers an interrupt.
- The microcontroller pauses updating the time, rings the bell (by running the ISR), and then returns to updating the time.
Simple, right?
In a Simple Diagram:
Main Program --> [Interrupt Occurs] --> ISR Runs --> Main Program ContinuesSimple External Interrupt ISR in C
Imagine:
- You have a button connected to a GPIO pin (say Pin 2).
- When the button is pressed, the microcontroller should turn ON an LED.
C Code Example:
#include <avr/io.h> // Header for I/O functions (AVR microcontrollers)
#include <avr/interrupt.h> // Header for Interrupt functions
void setup()
{
// Set Pin 2 (PD2) as input (button)
DDRD &= ~(1 << PD2);
// Set Pin 5 (PB5) as output (LED)
DDRB |= (1 << PB5);
// Enable external interrupt INT0 (which is usually on PD2)
EIMSK |= (1 << INT0);
// Set interrupt on rising edge (button press)
EICRA |= (1 << ISC01) | (1 << ISC00);
// Enable global interrupts
sei();
}
ISR(INT0_vect)
{
// This function will run when the button is pressed
PORTB ^= (1 << PB5); // Toggle LED (ON if OFF, OFF if ON)
}
int main(void)
{
setup(); // Call the setup function
while (1)
{
// Main program loop does nothing
// Microcontroller waits here until interrupt happens
}
}
Now let’s explain this code line-by-line:
1. Header Files
#include <avr/io.h>
#include <avr/interrupt.h>
avr/io.h: To control input/output pins.avr/interrupt.h: To use interrupt-related functions and macros.
2. Setup Function
void setup()
{
// Set Pin 2 as Input
DDRD &= ~(1 << PD2);
DDRDis the Data Direction Register for Port D.PD2means Pin 2 of Port D.&= ~(1 << PD2)sets that pin as input.
// Set Pin 5 as Output
DDRB |= (1 << PB5);
DDRBis the Data Direction Register for Port B.PB5usually controls the on-board LED.|= (1 << PB5)sets it as output.
3. Enable External Interrupt
EIMSK |= (1 << INT0);
EIMSKis the External Interrupt Mask Register.INT0is the external interrupt for Pin 2.- This enables external interrupt 0.
4. Set Interrupt Trigger (Rising Edge)
EICRA |= (1 << ISC01) | (1 << ISC00);
EICRAis the External Interrupt Control Register A.ISC01andISC00bits control how the interrupt is triggered.- Setting both = trigger interrupt on rising edge (button press).
5. Enable Global Interrupts
sei();
sei()function enables global interrupts.- Without this, no interrupt would happen!
6. Interrupt Service Routine (ISR)
ISR(INT0_vect)
{
PORTB ^= (1 << PB5);
}
ISR(INT0_vect)defines the Interrupt Service Routine for External Interrupt 0.- Inside the ISR, we toggle the LED:
- If LED was OFF, it turns ON.
- If LED was ON, it turns OFF.
7. Main Loop
int main(void)
{
setup();
while (1)
{
// Main code does nothing
}
}
- We call
setup()once to configure pins and interrupts. - Then, we sit in a forever loop.
- The real work (turning the LED ON/OFF) happens inside the ISR when the button is pressed.
Important Note:
- Never put
delayor slow code inside an ISR.
(Because it blocks the microcontroller from responding to new interrupts!) - Keep ISRs short and fast!
Final Big Picture Diagram:
Button Press (on PD2) --> Trigger INT0 Interrupt --> Run ISR(INT0_vect) --> Toggle LED --> Return to Main LoopQuick Summary
| Term | Meaning |
|---|---|
| Interrupt | A sudden event that needs immediate attention |
| ISR | Special function that runs when an interrupt occurs |
| Interrupt Vector Table | List that stores addresses of all ISRs |
Why Do We Need to Enable or Disable Interrupts?
- Enable interrupts when you want your system to listen and respond to external or internal events.
- Disable interrupts temporarily if:
- You are performing a critical task that should not be interrupted (example: updating shared memory).
- You want to avoid conflicts between normal code and interrupt code.
How to Enable and Disable an Interrupt?
In general, enabling and disabling interrupts can happen in two ways:
- Globally — affecting all interrupts.
- Individually — affecting a specific interrupt.
Let’s see both!
Enabling and Disabling Global Interrupts
When you disable global interrupts, all interrupts are temporarily ignored.
When you enable global interrupts, the CPU starts accepting interrupts again.
Common in C programming (Microcontrollers like AVR, ARM):
// Disable all interrupts globally
__disable_irq(); // For ARM Cortex (CMSIS standard)
cli(); // For AVR (Atmel chips)
// Enable all interrupts globally
__enable_irq(); // For ARM Cortex
sei(); // For AVR
Notes:
cli()= Clear Interrupt Flag (disable all interrupts)sei()= Set Interrupt Flag (enable all interrupts)
Enabling and Disabling Specific Interrupts
Sometimes you don’t want to disable all interrupts — only a specific one (like just disabling the timer interrupt).
Example: Disabling specific interrupt in C
// Assuming you're using an AVR microcontroller
TIMSK0 &= ~(1 << TOIE0); // Disable Timer0 Overflow Interrupt
// To enable it back
TIMSK0 |= (1 << TOIE0); // Enable Timer0 Overflow Interrupt
TIMSK0is the Timer Interrupt Mask Register.TOIE0is the Timer Overflow Interrupt Enable bit.
Important Best Practices for Beginners
- Only disable interrupts for a very short time (few microseconds) to avoid missing important events.
- Always re-enable interrupts after your critical code section.
- Never disable interrupts during long tasks like delays, communication, etc.
Example of correct usage:
__disable_irq(); // Disable interrupts
// Critical section starts
shared_variable = 10; // Safely update
// Critical section ends
__enable_irq(); // Enable interrupts
What Happens if You Forget to Enable Interrupts?
If you disable interrupts and forget to enable them again:
- Your system may stop responding to events.
- Timers, communication (UART, SPI, I2C), and other peripherals may fail.
- It can freeze parts of your program.
Always double-check: if you disable interrupts, enable them back!
Summary for Enable / Disable Interrupts
| Task | C Code (ARM Cortex) | C Code (AVR) |
|---|---|---|
| Disable all interrupts | __disable_irq(); | cli(); |
| Enable all interrupts | __enable_irq(); | sei(); |
| Disable specific interrupt | Clear relevant bit in interrupt mask register | Same |
| Enable specific interrupt | Set relevant bit in interrupt mask register | Same |
Interrupt Priority in 8051 Microcontroller
Interrupt Priority means deciding which interrupt should be serviced first if two or more interrupts happen at the same time.
The 8051 microcontroller allows us to assign priorities to each interrupt:
- Higher priority interrupt gets serviced first.
- Lower priority interrupt waits until higher priority one finishes.
Thus, even if multiple events occur together, the CPU always knows which one is more important to handle first.
How Many Interrupts Are There in 8051?
The standard 8051 microcontroller has five interrupt sources:
| Interrupt Name | Type | Description |
|---|---|---|
| INT0 | External | External Interrupt 0 (P3.2 pin) |
| Timer 0 | Internal | Timer 0 Overflow |
| INT1 | External | External Interrupt 1 (P3.3 pin) |
| Timer 1 | Internal | Timer 1 Overflow |
| Serial | Internal | Serial Communication (Receive/Transmit Complete) |
How is Interrupt Priority Set in 8051?
In 8051, interrupt priorities are set using a special register called the Interrupt Priority Register (IP).
Each bit of the IP register corresponds to one interrupt:
- Bit =
1→ High Priority - Bit =
0→ Low Priority
Structure of IP Register:
| Bit | Name | Interrupt |
|---|---|---|
| 7 | – | (Reserved) |
| 6 | – | (Reserved) |
| 5 | PS | Serial Port |
| 4 | PT1 | Timer 1 |
| 3 | PX1 | External Interrupt 1 |
| 2 | PT0 | Timer 0 |
| 1 | PX0 | External Interrupt 0 |
| 0 | – | (Reserved) |
Example:
IP = 0x10; // Set Timer 1 (PT1) as high priority
Default Interrupt Priority Order (Without Manual Setting)
If you don’t set anything manually, the default priority order is:
- External Interrupt 0 (INT0)
- Timer 0 Overflow
- External Interrupt 1 (INT1)
- Timer 1 Overflow
- Serial Communication
👉 Lower number = Higher default priority
Example: Practical Understanding
Suppose:
- External Interrupt 0 (INT0) is set to high priority.
- Timer 1 Overflow is set to low priority.
If both interrupts occur together:
- INT0 will be serviced immediately.
- Timer 1 must wait until INT0’s ISR is completed.
Can Higher Priority Interrupt Interrupt an Ongoing ISR?
✅ Yes!
If the CPU is executing a low-priority ISR and a high-priority interrupt occurs, the CPU pauses the low-priority ISR, services the high-priority ISR, and then returns back to complete the low-priority ISR.
But if two interrupts have the same priority, no interrupt nesting happens. The CPU finishes the current ISR first and then services the next interrupt.
Comparison between Interrupts and Polling:
| Aspect | Interrupts | Polling |
|---|---|---|
| Definition | CPU is alerted by hardware when attention is needed. | CPU repeatedly checks the device status at regular intervals. |
| CPU Usage | Efficient; CPU works on other tasks until interrupted. | Inefficient; CPU wastes cycles checking status. |
| Response Time | Immediate (when interrupt occurs). | Depends on polling frequency; can be delayed. |
| System Efficiency | High, as CPU can perform other tasks. | Low, especially if polling rate is high. |
| Complexity | More complex to implement (needs ISR – Interrupt Service Routine). | Simpler to implement. |
| Power Consumption | Lower (saves power by sleeping/waiting). | Higher (continuous checking uses more power). |
| Suitability | Best for time-critical applications. | Suitable for simple, non-time-critical tasks. |
| Example Use Case | Keyboard input handling, real-time systems. | Reading sensor data at fixed intervals. |
Interrupt Triggering Methods
Interrupts can be triggered in multiple ways, each with its own behavior and use case:
1. Level Triggered Interrupts
Level-triggered interrupts occur when a signal stays high (or low) for a certain period. The interrupt is triggered as long as the level condition is met.
- Example: A button connected to the GPIO pin. If the button is pressed, the voltage level changes, and the interrupt is triggered as long as the button remains pressed.
2. Edge Triggered Interrupts
Edge-triggered interrupts occur when the signal changes state, such as from low to high (rising edge) or high to low (falling edge). These are often used when you only want to respond once to a signal transition.
- Example: An external clock or pulse generator. You might want to trigger an interrupt every time the signal transitions from low to high.
3. Both Edge Triggered Interrupts
Some systems support interrupts on both rising and falling edges. This means the interrupt will be triggered whenever the signal transitions from low to high or high to low.
- Example: A system that needs to respond to every clock pulse, whether it’s rising or falling.
Setting Up Interrupts in Embedded Systems
Setting up interrupts typically involves the following steps:
- Configure the Interrupt: Set the interrupt priority, triggering method (rising edge, falling edge, level triggered), and the pin to which the interrupt is connected.
- Enable the Interrupt: Enable the interrupt in the processor’s interrupt controller to start listening for the event.
- Write an Interrupt Service Routine (ISR): The ISR is the function executed when the interrupt occurs. The ISR should be as fast as possible to avoid interrupting other important processes.
- Enable Global Interrupts: After setting up the individual interrupt, enable global interrupts in the system to allow interrupts to occur.
Example Code for Setting up an Interrupt in C (Embedded Systems)
#include <avr/io.h>
#include <avr/interrupt.h>
void init_interrupt()
{
// Set INT0 (external interrupt 0) to trigger on the rising edge
EICRA |= (1 << ISC01) | (1 << ISC00); // ISC01 and ISC00 bits for rising edge
EIMSK |= (1 << INT0); // Enable INT0 interrupt
sei(); // Enable global interrupts
}
ISR(INT0_vect)
{
// Interrupt Service Routine (ISR) for INT0
// This code will execute when the interrupt occurs
PORTB ^= (1 << PB0); // Toggle LED on PB0
}
int main()
{
DDRB |= (1 << PB0); // Set PB0 as output for LED
init_interrupt(); // Initialize interrupt
while (1)
{
// Main program loop
// The program will continue running while waiting for interrupts
}
}
Common Interrupts in Embedded Systems
- Timer Interrupts: Used to trigger an interrupt after a specific time delay.
- External Interrupts: Triggered by external events such as a button press or signal change on a GPIO pin.
- USART Interrupts: Triggered when there is data received or transmitted via UART/USART.
- ADC Interrupts: Triggered when an Analog-to-Digital Conversion (ADC) is completed.
Best Practices for Handling Interrupts
- Keep ISRs Short and Efficient: Interrupts should be serviced as quickly as possible to avoid blocking other interrupts or tasks.
- Minimize Global Variables in ISR: Avoid using global variables directly in the ISR. If needed, mark them
volatileto prevent optimization issues. - Use Interrupt Priorities: In complex systems, interrupt priorities ensure that more important interrupts are processed first.
- Disable Interrupts When Necessary: In critical sections of your code, disable interrupts temporarily to avoid unexpected behavior.
Differentiating the level-triggered and edge-triggered interrupt methods:
| Aspect | Level-Triggered Interrupts | Edge-Triggered Interrupts |
|---|---|---|
| Triggering Condition | Triggered when the signal remains at a specific level (high or low) for a period of time. | Triggered when there is a transition in the signal, either from low to high (rising edge) or from high to low (falling edge). |
| Behavior | Interrupt remains active as long as the condition (level) is met. | Interrupt is triggered only once per signal transition. |
| Examples | A button press (signal stays high or low while the button is pressed). | A pulse generator (interrupt triggered on each pulse). |
| Type of Signal | Continuous (signal level stays constant). | Discrete (signal changes state). |
| Use Case | Typically used for continuous monitoring of a signal state (e.g., power-on signals, continuous sensor readings). | Used for detecting specific events like edges of clock signals, pulse counting, or event-driven systems. |
| Complexity | Simpler to implement but may result in longer interrupt durations. | More complex but allows for precise handling of events at the signal transition. |
| Example Application | Button press detection, monitoring constant voltage levels. | Clock edge detection, signal pulse measurement. |
Frequently Asked Questions (FAQ) on Embedded System Interrupts
Q1: What is an interrupt in embedded systems?
- An interrupt is a mechanism by which a processor’s normal execution flow is interrupted to handle an event or a condition that needs immediate attention. It allows the processor to deal with high-priority tasks in real-time.
Q2: What are the types of interrupts?
- Hardware Interrupts: Triggered by external devices like sensors or timers, which notify the processor of the need for attention.
- Software Interrupts: Generated by software instructions to request specific services, such as system calls.
Q3: What are interrupt vectors?
- Interrupt vectors are memory addresses associated with each interrupt. When an interrupt occurs, the processor looks up the corresponding interrupt vector to find the appropriate service routine.
Q4: What is an interrupt vector table (IVT)?
- The Interrupt Vector Table (IVT) is a table of addresses that defines where the processor should jump when an interrupt occurs. It contains the addresses of interrupt service routines (ISR) for each interrupt source.
Q5: What is an Interrupt Service Routine (ISR)?
- An ISR is a function or routine that is executed when a specific interrupt occurs. It handles the interrupt, performs necessary tasks, and then returns control back to the main program.
Q6: What is interrupt priority?
- Interrupt priority determines the order in which multiple interrupts are handled. High-priority interrupts are handled before low-priority ones, ensuring time-sensitive tasks are addressed first.
Q7: What are nested interrupts?
- Nested interrupts allow a higher-priority interrupt to interrupt the ISR of a lower-priority interrupt. This ensures that critical tasks can preempt less important tasks.
Q8: How does interrupt masking work?
- Interrupt masking is used to disable or enable specific interrupts. The processor may mask certain interrupts to prevent them from interrupting the current process, which can be useful for critical sections in the code.
Q9: What is the difference between edge-triggered and level-triggered interrupts?
- Edge-triggered interrupts: Triggered by a change in the signal (either rising or falling edge).
- Level-triggered interrupts: Triggered when the interrupt signal remains at a certain level (high or low) for a period of time.
Q10: How are interrupts managed in microcontrollers?
- Microcontrollers usually have a dedicated interrupt controller (such as a Nested Vectored Interrupt Controller – NVIC) to handle and prioritize interrupts. This controller determines the response and execution order for interrupts.
Q11: What are the common uses of interrupts in embedded systems?
- Interrupts are used in time-sensitive applications like handling external sensors, timers, communication protocols (e.g., UART, SPI, I2C), and real-time processing.
Q12: What is interrupt latency?
- Interrupt latency is the time taken by the processor to start executing an ISR after an interrupt has occurred. Lower latency is critical for real-time applications.
Q13: What is the importance of context switching in interrupt handling?
- Context switching refers to saving the state of the current process and loading the state of the ISR when an interrupt occurs. It ensures that the main program can resume after the ISR is executed.
Q14: How do you avoid interrupt handling issues like jitter and race conditions?
- Proper synchronization techniques such as disabling interrupts, using flags, or employing atomic operations can help avoid issues like jitter (variability in interrupt response time) and race conditions (conflict between interrupt and main program).
Q15: What is the difference between polling and interrupt-based systems?
- Polling: The processor continuously checks if an event has occurred.
- Interrupt-based: The processor is alerted to an event only when it happens, reducing unnecessary CPU usage.
Q16: What are interrupt-driven I/O systems?
- In interrupt-driven I/O systems, the processor is interrupted when I/O operations (such as reading from a sensor or writing to a peripheral) are ready to be processed, instead of constantly checking the status.
Q17: How do you implement an interrupt in an embedded system?
- Steps include:
- Enable the interrupt source (e.g., a peripheral or timer).
- Configure the interrupt vector table.
- Write the ISR to handle the interrupt.
- Enable global interrupts.
- Ensure proper return from the ISR to resume normal execution.
You can also Visit other tutorials of Embedded Prep
- What is eMMC (Embedded MultiMediaCard) memory ?
- Top 30+ I2C Interview Questions
- Bit Manipulation Interview Questions
- Structure and Union in c
- Little Endian vs. Big Endian: A Complete Guide
- Merge sort algorithm
Special thanks to @embedded-prep for contributing to this article on Embedded Prep
Mr. Raj Kumar is a highly experienced Technical Content Engineer with 7 years of dedicated expertise in the intricate field of embedded systems. At Embedded Prep, Raj is at the forefront of creating and curating high-quality technical content designed to educate and empower aspiring and seasoned professionals in the embedded domain.
Throughout his career, Raj has honed a unique skill set that bridges the gap between deep technical understanding and effective communication. His work encompasses a wide range of educational materials, including in-depth tutorials, practical guides, course modules, and insightful articles focused on embedded hardware and software solutions. He possesses a strong grasp of embedded architectures, microcontrollers, real-time operating systems (RTOS), firmware development, and various communication protocols relevant to the embedded industry.
Raj is adept at collaborating closely with subject matter experts, engineers, and instructional designers to ensure the accuracy, completeness, and pedagogical effectiveness of the content. His meticulous attention to detail and commitment to clarity are instrumental in transforming complex embedded concepts into easily digestible and engaging learning experiences. At Embedded Prep, he plays a crucial role in building a robust knowledge base that helps learners master the complexities of embedded technologies.