CAN Bus Message Filtering : In a modern vehicle or embedded system, hundreds of sensors and controllers need to communicate with each other. This communication is handled efficiently by the CAN (Controller Area Network) bus. But with so many messages flowing through the network, how do devices know which messages are meant for them? That’s where CAN Bus Message Filtering comes into play.
In this article, we’ll break down the concept of message filtering in CAN bus in a simple, beginner-friendly way.
What is CAN Bus?
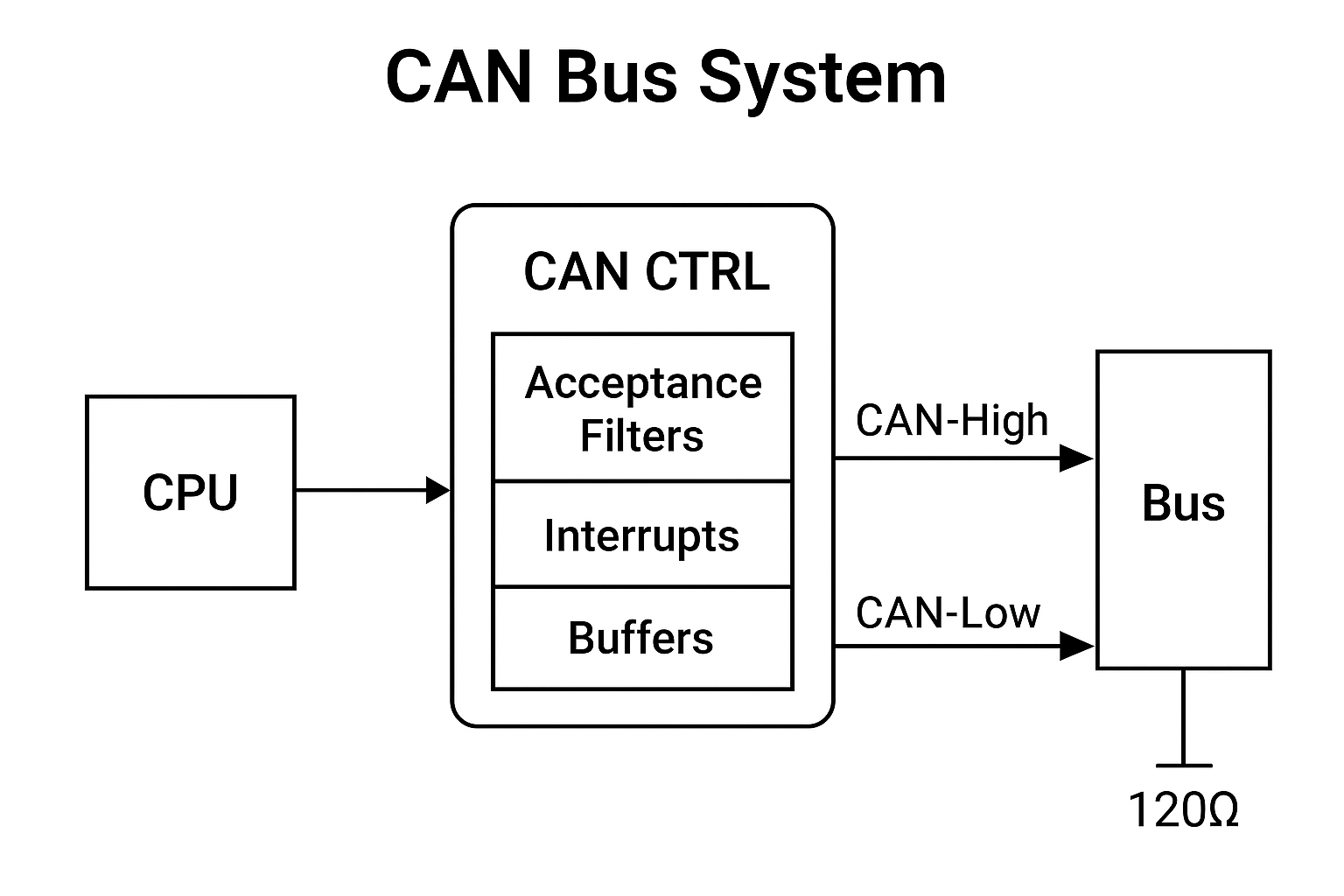
The CAN bus is a robust communication protocol used in automobiles, industrial automation, and embedded systems. It allows multiple devices (called nodes) to communicate with each other using a shared bus line. Each message sent over the CAN bus has a unique identifier (ID) that represents its content or priority.
What is Message Filtering in CAN Bus?
Definition:
CAN Bus Message Filtering is a method used by nodes to accept only specific messages from the network based on their identifiers. This helps each node ignore irrelevant data and process only the information it needs.
Why is it Needed?
- Reduces CPU workload.
- Improves efficiency.
- Prevents buffer overload.
- Saves memory by storing only necessary messages.
How Does Message Filtering Work?
Each CAN controller (hardware or software) is equipped with filter registers and mask registers. Here’s how filtering is applied:
1. Identifier Matching
Every message on the CAN bus comes with an identifier. The receiving node checks this ID against its filter settings.
2. Mask and Filter
- A mask defines which bits of the identifier should be compared.
- A filter holds the expected value for those bits.
If the result matches, the message is accepted. Otherwise, it’s ignored.
3. Example:
Let’s say a node is only interested in messages with IDs between 0x100 and 0x1FF. It can be configured with:
- Mask:
0x700 - Filter:
0x100
This way, only messages matching those patterns get through.
Types of CAN Message Filtering
✅ Hardware Filtering:
- Done by the CAN controller itself.
- Fast and efficient.
- Ideal for high-performance applications.
✅ Software Filtering:
- Implemented in the microcontroller or processor.
- More flexible but uses CPU cycles.
Real-Life Use Case of CAN Message Filtering
In a car, multiple Electronic Control Units (ECUs) share data over the CAN bus. For example:
- The engine ECU may only want to read throttle and temperature messages.
- The brake ECU may only need wheel speed and ABS-related data.
By setting CAN bus message filters, each ECU receives only what it needs.
Key Benefits of Message Filtering
- 🔍 Focused communication: Nodes process only relevant data.
- 🚀 Boosted performance: Less data to handle means faster response.
- 🧠 Efficient memory use: Filters prevent unnecessary storage.
- ⚙️ Simpler software logic: Only targeted data is considered.
Frequently Asked Questions (FAQ) on CAN Bus Message Filtering
Q1: What is CAN Bus Message Filtering?
Answer:
CAN Bus Message Filtering is a process where a CAN node accepts only specific messages from the CAN network based on their identifiers. This helps the node ignore irrelevant messages and focus on the ones it needs.
Q2: Why is message filtering important in CAN communication?
Answer:
Message filtering is important because it:
- Reduces CPU load
- Saves memory
- Improves performance
- Prevents buffer overflow
Without filtering, every node would need to process all messages, leading to inefficiencies.
Q3: How does a CAN node decide which messages to accept?
Answer:
Each CAN node uses a combination of filter and mask registers to decide which message IDs to accept. The message’s identifier is compared with the filter settings, and if it matches, the message is accepted.
Q4: What is the difference between mask and filter in CAN bus?
Answer:
- A mask specifies which bits of the incoming message ID to compare.
- A filter holds the reference value to match against those bits.
Together, they help define filtering rules for incoming CAN messages.
Q5: What are the types of CAN message filtering?
Answer:
There are two main types:
- Hardware filtering: Performed by the CAN controller, fast and efficient.
- Software filtering: Done by the processor in code, more flexible but uses CPU resources.
Q6: Can I filter extended (29-bit) CAN IDs?
Answer:
Yes. CAN controllers that support extended IDs (29-bit) can apply filtering to those as well. You just need to configure filters and masks accordingly for 29-bit identifiers.
Q7: Do all microcontrollers support CAN message filtering?
Answer:
Most modern microcontrollers with built-in CAN controllers support message filtering. However, the number of filters available may vary between chips, so check your hardware datasheet.
Q8: Can filtering be done in software only?
Answer:
Yes, software filtering can be implemented if the CAN controller passes all messages to the CPU. However, this is less efficient compared to hardware filtering and is generally used in low-traffic systems.
Q9: Is CAN message filtering configurable during runtime?
Answer:
In many systems, yes. Filter and mask values can be updated during runtime, depending on the CAN controller and driver support. This is useful in dynamic systems that need to change behavior.
Q10: Does message filtering affect CAN bus speed?
Answer:
Filtering itself doesn’t affect the CAN bus speed, but it improves the overall system efficiency by reducing the processing time and memory usage for each node.
Conclusion
CAN Bus Message Filtering is a critical feature that ensures reliable and efficient communication in embedded and automotive systems. By allowing nodes to selectively listen to the network, filtering helps maintain order in what would otherwise be a chaotic stream of data.
Understanding this concept is essential for anyone working with CAN protocol or embedded systems development. Now that you’ve got the basics down, you can explore how to configure these filters in hardware or software in your next CAN project
You can also Visit other tutorials of Embedded Prep
- Multithreading in C++
- Multithreading Interview Questions
- Multithreading in Operating System
- Multithreading in Java
- POSIX Threads pthread Beginner’s Guide in C/C++
- Speed Up Code using Multithreading
- Limitations of Multithreading
- Common Issues in Multithreading
- Multithreading Program with One Thread for Addition and One for Multiplication
- Advantage of Multithreading
- Disadvantages of Multithreading
- Applications of Multithreading: How Multithreading Makes Modern Software Faster and Smarter”
Mr. Raj Kumar is a highly experienced Technical Content Engineer with 7 years of dedicated expertise in the intricate field of embedded systems. At Embedded Prep, Raj is at the forefront of creating and curating high-quality technical content designed to educate and empower aspiring and seasoned professionals in the embedded domain.
Throughout his career, Raj has honed a unique skill set that bridges the gap between deep technical understanding and effective communication. His work encompasses a wide range of educational materials, including in-depth tutorials, practical guides, course modules, and insightful articles focused on embedded hardware and software solutions. He possesses a strong grasp of embedded architectures, microcontrollers, real-time operating systems (RTOS), firmware development, and various communication protocols relevant to the embedded industry.
Raj is adept at collaborating closely with subject matter experts, engineers, and instructional designers to ensure the accuracy, completeness, and pedagogical effectiveness of the content. His meticulous attention to detail and commitment to clarity are instrumental in transforming complex embedded concepts into easily digestible and engaging learning experiences. At Embedded Prep, he plays a crucial role in building a robust knowledge base that helps learners master the complexities of embedded technologies.