
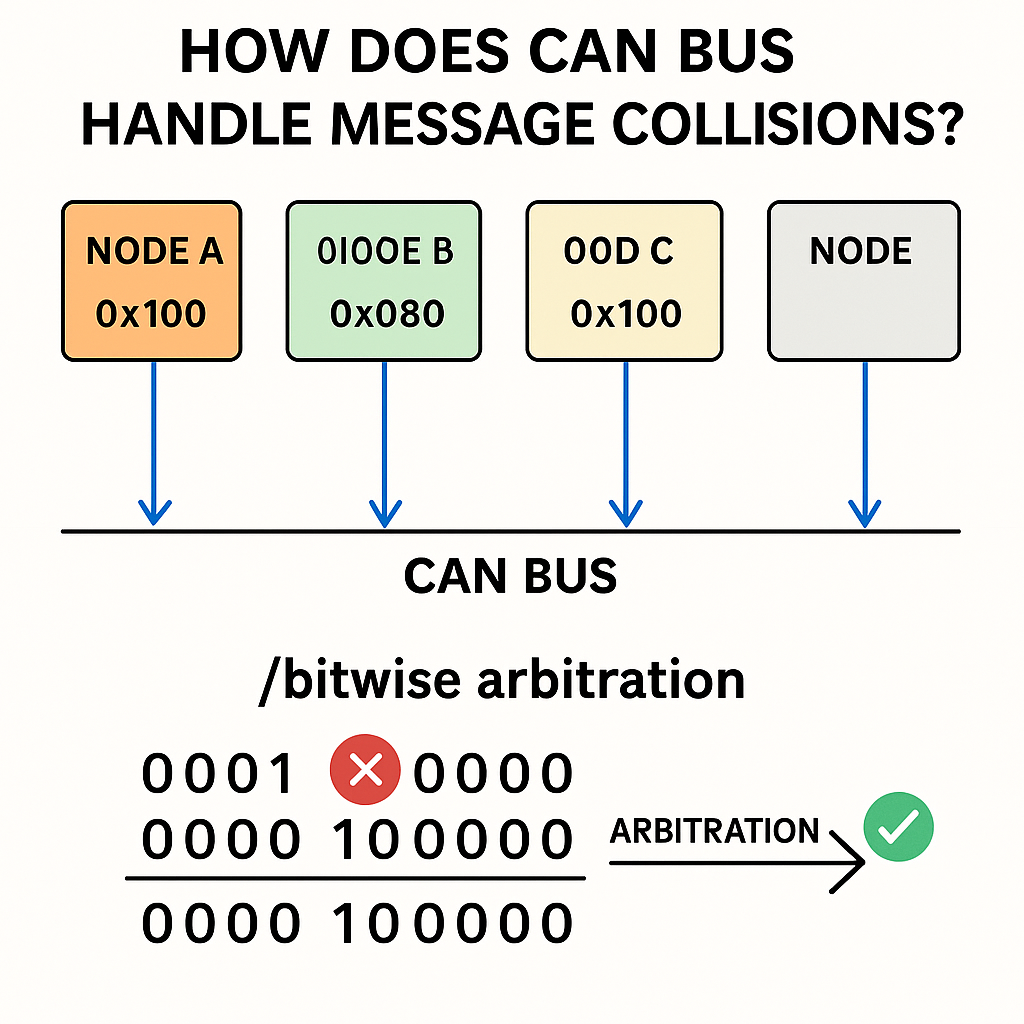
How Does CAN Bus Handle Message Collisions : is a key feature of the Controller Area Network (CAN) protocol that ensures reliable communication between multiple devices on the same bus. When two or more nodes attempt to transmit messages simultaneously, the CAN protocol uses a non-destructive method called bitwise arbitration to decide which message gets priority.
This mechanism compares message identifiers bit-by-bit, where a dominant bit (0) always overrides a recessive bit (1). The message with the lowest ID (highest priority) wins the arbitration and continues transmission, while the others automatically back off and retry once the bus is idle again. This ensures zero data loss, smooth communication, and real-time message prioritization—making CAN ideal for automotive, industrial, and embedded systems.
Understanding how CAN bus handles message collisions helps developers design efficient communication between Electronic Control Units (ECUs) and avoid network congestion.
Let’s understand how it works:
Step-by-Step: How Does CAN Bus Handle Message Collisions
- All devices listen before talking:
- Every node waits until the bus is idle.
- Then it starts transmitting its message.
- Messages have priorities:
- Each CAN message has an identifier (ID) — a lower number means higher priority.
- Example: ID
0x100has lower priority than ID0x080.
- Bitwise Arbitration Begins:
- CAN transmits the message bit-by-bit (starting with the ID).
- As each bit is sent, the node also listens to the bus.
- Dominant vs Recessive Bits:
- Dominant (0) wins over Recessive (1).
- If a node sends a recessive bit but sees a dominant bit, it knows another node has higher priority and stops transmitting.
- The highest-priority message wins:
- The node with the lowest ID (highest priority) continues transmission.
- The others wait and try again after the bus becomes idle.
Example
Let’s say two nodes try to send:
- Node A: ID
0x100→ binary0001 0000 0000 - Node B: ID
0x080→ binary0000 1000 0000
Arbitration:
- Both start sending at the same time.
- Bit-by-bit comparison:
- Bit 1: Both send 0 → OK
- Bit 2: Both send 0 → OK
- Bit 4: Node A sends 1 (recessive), Node B sends 0 (dominant)
- Node A detects this and backs off.
👉 Node B wins and continues transmission. Node A retries later.
Why is this Useful?
- No data loss during collision.
- No time wasted — no delay or error recovery needed.
- Ensures real-time priority — critical messages always go through first.
FAQs – CAN Bus Message Collisions
Q1: What happens when two CAN nodes send messages at the same time?
Answer:
Both nodes start transmitting their message and enter an arbitration process using the identifier bits. The node with the lowest numerical ID (highest priority) continues, while the other stops and retries later.
Q2: How does CAN determine which message gets priority?
Answer:
CAN uses the message identifier (ID) for arbitration. Lower ID numbers have higher priority. The priority is resolved bit-by-bit, where a dominant bit (0) overrides a recessive bit (1).
Q3: Is any data lost during a collision?
Answer:
No, no data is lost. The message with lower priority simply stops transmitting as soon as it detects that a higher priority message is being sent. It then retries automatically once the bus is free.
Q4: What are dominant and recessive bits in CAN?
Answer:
In CAN protocol:
- Dominant bit (0) = stronger signal, overrides others on the bus.
- Recessive bit (1) = weaker signal, gets overridden by dominant bit.
This behavior is key to the arbitration mechanism.
Q5: Does CAN use time-based collision detection like Ethernet?
Answer:
No, CAN does not use time-based or random backoff methods like Ethernet. Instead, it uses bitwise arbitration which allows collisions to be resolved non-destructively and instantly.
Q6: What happens to the message that lost arbitration?
Answer:
The losing node simply waits for the bus to become idle again and then retries sending its message. It does not need to recreate or repackage the data.
Q7: Can two messages with the same ID be sent at the same time?
Answer:
Technically yes, but it’s not recommended because they would appear identical on the bus. This could cause data inconsistencies or confusion in the receiving nodes. CAN systems are typically designed to avoid duplicate IDs.
Q8: Is arbitration visible to the user or application?
Answer:
No, arbitration is handled entirely by the CAN controller hardware. From the software’s perspective, it only sees whether the message was sent successfully or needs to be retried.
Summary
| Feature | CAN Bus Collision Handling |
|---|---|
| Method | Bitwise arbitration |
| Key Concept | Dominant (0) wins over recessive (1) |
| Result | Only the highest-priority message is sent |
| Benefit | No data corruption or retransmission needed |
You can also Visit other tutorials of Embedded Prep
- Multithreading in C++
- Multithreading Interview Questions
- Multithreading in Operating System
- Multithreading in Java
- POSIX Threads pthread Beginner’s Guide in C/C++
- Speed Up Code using Multithreading
- Limitations of Multithreading
- Common Issues in Multithreading
- Multithreading Program with One Thread for Addition and One for Multiplication
- Advantage of Multithreading
- Disadvantages of Multithreading
- Applications of Multithreading: How Multithreading Makes Modern Software Faster and Smarter”
Mr. Raj Kumar is a highly experienced Technical Content Engineer with 7 years of dedicated expertise in the intricate field of embedded systems. At Embedded Prep, Raj is at the forefront of creating and curating high-quality technical content designed to educate and empower aspiring and seasoned professionals in the embedded domain.
Throughout his career, Raj has honed a unique skill set that bridges the gap between deep technical understanding and effective communication. His work encompasses a wide range of educational materials, including in-depth tutorials, practical guides, course modules, and insightful articles focused on embedded hardware and software solutions. He possesses a strong grasp of embedded architectures, microcontrollers, real-time operating systems (RTOS), firmware development, and various communication protocols relevant to the embedded industry.
Raj is adept at collaborating closely with subject matter experts, engineers, and instructional designers to ensure the accuracy, completeness, and pedagogical effectiveness of the content. His meticulous attention to detail and commitment to clarity are instrumental in transforming complex embedded concepts into easily digestible and engaging learning experiences. At Embedded Prep, he plays a crucial role in building a robust knowledge base that helps learners master the complexities of embedded technologies.
![CAN Interview Questions – Master Beginner-Friendly Tutorial [2025]](https://embeddedprep.com/wp-content/uploads/2025/07/CAN-Interview-Questions-–-Master-Beginner-Friendly-Tutorial-2025.png)





