
Real-time questions related to QNX : Real-time systems are crucial in industries that require highly predictable and time-sensitive operations. In embedded systems, especially in applications like automotive, telecommunications, medical devices, and robotics, real-time performance is not just a feature; it is a necessity. Among the many real-time operating systems available, QNX stands out due to its robustness, modularity, and real-time capabilities.
What is QNX?
QNX is a commercial, Unix-like real-time operating system (RTOS) designed primarily for embedded systems. Unlike general-purpose operating systems, QNX is optimized for real-time performance, meaning it can guarantee responses to inputs within strict time constraints. This ensures that time-sensitive tasks are executed without delay, which is crucial for systems that must respond promptly to external stimuli or control systems.
At its core, QNX utilizes a microkernel architecture. The QNX microkernel is a lightweight and efficient core that handles basic operations such as task scheduling, memory management, and inter-process communication (IPC). Everything else, including device drivers, file systems, and network services, runs in user space, isolated from the kernel. This separation enhances system reliability and fault tolerance, ensuring that if one service fails, it does not affect others.
The Significance of Real-Time Performance
In real-time systems, the concept of time is critical. Real-time performance is classified into two categories:
- Hard Real-Time: Systems that must meet strict deadlines. Missing a deadline could result in catastrophic failures (e.g., life-support systems in hospitals, automotive safety features).
- Soft Real-Time: Systems where deadlines are important but not critical. Missing a deadline does not cause immediate failure, but it may degrade performance or user experience (e.g., streaming services, video conferencing).
QNX is designed to provide hard real-time capabilities, which is essential for applications requiring absolute predictability in time-critical environments. The operating system ensures that tasks are executed within specific time constraints, regardless of system load.
QNX Scheduling and Task Management
One of the most critical aspects of real-time operating systems is how they manage tasks and schedules. In QNX, real-time scheduling is deterministic, meaning it can guarantee that tasks will be executed at the right time without delays.
QNX employs priority-based preemptive scheduling, which ensures that tasks are scheduled according to their urgency. When multiple tasks are ready to execute, the scheduler selects the highest-priority task first. If a higher-priority task becomes ready while a lower-priority task is running, QNX will preempt the current task and execute the higher-priority one immediately. This mechanism helps ensure that critical tasks are always executed on time.
Additionally, round-robin scheduling can be used for tasks with equal priority. In this scheme, each task is given an equal time slice to execute before control is passed to the next task in the queue, ensuring fairness in CPU usage.
Microkernel Architecture and Modularity
The key feature of QNX is its microkernel architecture, which is different from traditional monolithic kernels. In a monolithic kernel, the entire OS runs in supervisor mode, meaning any failure in one part of the OS could affect the entire system. In contrast, QNX’s microkernel only provides essential services, such as managing processes, scheduling, and interrupt handling, while other services like device drivers, file systems, and networking run in user space.
This modular approach offers several benefits:
- Fault Isolation: If one service crashes (e.g., a device driver), it does not bring down the entire system. This isolation improves the system’s stability.
- Flexibility: Developers can customize QNX by adding or removing modules without affecting the core kernel.
- Safety: Critical operations can be isolated, and failures can be contained within their own modules, preventing cascading failures.
The modularity of QNX is beneficial for embedded systems where the operating system needs to be lightweight, flexible, and fault-tolerant.
Real-Time Synchronization in QNX
Synchronization between tasks is essential in a real-time operating system, especially in systems that handle concurrent processes. QNX provides several synchronization mechanisms to manage resource access and ensure tasks execute in a coordinated manner.
- Mutexes are used to ensure that only one task can access a shared resource at any given time, preventing race conditions.
- Semaphores help coordinate the execution of multiple tasks. Tasks can signal each other to indicate when they are ready to proceed.
- Condition Variables allow tasks to wait for specific conditions to be true before they continue executing, offering fine-grained control over task sequencing.
These synchronization tools ensure that tasks in QNX can work together without causing conflicts, delays, or data corruption, which is vital for maintaining real-time performance.
Interrupt Handling in QNX
Interrupts are used to respond to external events in real time, and QNX excels in this area by providing efficient and predictable interrupt handling. The system allows for fast response times to hardware interrupts, ensuring that real-time events are processed immediately.
QNX allows developers to configure Interrupt Service Routines (ISRs), which are specialized functions that respond to interrupts. These routines are designed to execute quickly and efficiently, as interrupt handling must be completed as soon as possible to avoid delays. In addition to regular ISRs, QNX supports threaded ISRs, where interrupt handling can be deferred to a separate thread to process more complex tasks without blocking the real-time system.
Message-Passing and Inter-Process Communication (IPC)
In real-time embedded systems, tasks often need to communicate with one another. QNX uses message-passing as a fundamental mechanism for IPC. This allows different processes (or threads) to exchange data safely without interfering with one another.
QNX offers a range of IPC mechanisms, such as:
- Message Queues: Used for sending and receiving messages between tasks.
- Mailboxes: Specialized message queues with a fixed number of slots, useful for tasks that need to process a stream of messages.
- Signals: A lightweight mechanism to send simple notifications between tasks.
This message-passing system enables real-time tasks to coordinate efficiently and communicate without blocking or delaying critical operations.
Memory Management in QNX
Real-time memory management is another vital aspect of QNX. Memory allocation must be predictable and efficient to avoid delays that could impact real-time performance. QNX employs a real-time memory allocator that ensures quick memory allocation and deallocation while minimizing fragmentation.
One of the key features of QNX is its ability to manage memory across different partitions. Memory resources can be reserved for specific tasks or services, ensuring that each component of the system has the memory it needs to function correctly without interference.
QNX also provides support for shared memory between processes, allowing tasks to share data efficiently while maintaining separation for security and stability.
Fault Tolerance and System Reliability
Reliability and fault tolerance are paramount in real-time systems, and QNX is designed to meet these demands. The system ensures that tasks and processes are isolated from one another, so if one fails, it does not compromise the entire system. Furthermore, watchdog timers can be set up to monitor the system’s health. If a task fails or the system becomes unresponsive, the watchdog timer can trigger a recovery process to restore normal operation.
QNX also supports high-availability and failover mechanisms, which are particularly useful in mission-critical applications like automotive control systems or industrial automation, where system uptime is crucial.
By diving into the details of how QNX works, you can gain the expertise needed to build and optimize embedded real-time applications that meet the strict requirements of modern embedded systems.
1. How does QNX ensure real-time performance?
QNX is a real-time operating system (RTOS) designed to meet strict timing constraints. It ensures real-time performance through several key features:
Microkernel Architecture
- The QNX microkernel handles only the most critical tasks: scheduling, interrupt handling, interprocess communication (IPC), and synchronization.
- Other services (file system, network, etc.) run in user space, which makes the kernel faster and more predictable.
Priority-based Preemptive Scheduling
- QNX uses fixed-priority preemptive scheduling, where higher-priority tasks preempt lower-priority ones immediately.
- This ensures high-priority tasks meet their deadlines.
Fast Interprocess Communication (IPC)
- QNX’s message-passing IPC is highly optimized and synchronous by default.
- It allows fast and deterministic communication between threads and processes.
Timer Accuracy
- QNX provides high-resolution timers (microsecond accuracy) using its clock and timer services.
- You can schedule precise timeouts, delays, and periodic tasks.
Interrupt Handling
- Interrupt Service Routines (ISRs) are short and quick, and they usually defer processing to threads called Interrupt Threads (i-threads), which are real-time threads.
2. What is priority inversion and how does QNX handle it?
What is Priority Inversion?
It occurs when:
- A low-priority thread holds a shared resource (e.g., a mutex).
- A high-priority thread needs that resource and gets blocked.
- Meanwhile, a medium-priority thread preempts the low-priority one, preventing it from releasing the resource.
This “inverts” the priorities, and the high-priority task waits longer than expected—breaking real-time guarantees.
How QNX handles it
QNX solves this using priority inheritance:
- When a low-priority thread holds a mutex needed by a high-priority thread, QNX temporarily boosts the low-priority thread’s priority to match the high-priority one.
- This allows it to finish its work and release the resource quickly, minimizing the delay.
This mechanism is built into QNX’s native synchronization primitives, like pthread_mutex_t with the PRIO_INHERIT protocol.
3. Example: Writing a real-time application in QNX
Let’s write a simple real-time periodic task in QNX that runs every 1 second to simulate sensor reading.
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <pthread.h>
#include <sched.h>
#include <time.h>
void* sensor_task(void* arg) {
struct timespec interval = {1, 0}; // 1 second
struct timespec next_time;
// Get current time
clock_gettime(CLOCK_REALTIME, &next_time);
while (1) {
// Wait until next scheduled time
next_time.tv_sec += 1;
clock_nanosleep(CLOCK_REALTIME, TIMER_ABSTIME, &next_time, NULL);
// Simulate real-time task
printf("Sensor read at time: %ld\n", time(NULL));
}
return NULL;
}
int main() {
pthread_t thread;
pthread_attr_t attr;
struct sched_param param;
// Set thread attributes
pthread_attr_init(&attr);
pthread_attr_setschedpolicy(&attr, SCHED_FIFO); // Real-time policy
param.sched_priority = 50; // High priority (1-255 in QNX)
pthread_attr_setschedparam(&attr, ¶m);
pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED);
// Create real-time thread
pthread_create(&thread, &attr, sensor_task, NULL);
// Join thread (in real use case, main might do other work)
pthread_join(thread, NULL);
return 0;
}
Explanation:
- We set the thread scheduling policy to
SCHED_FIFO(real-time first-in, first-out). - We use
clock_nanosleepwithTIMER_ABSTIMEto make it wake up precisely every 1 second. - This is deterministic and respects real-time timing.
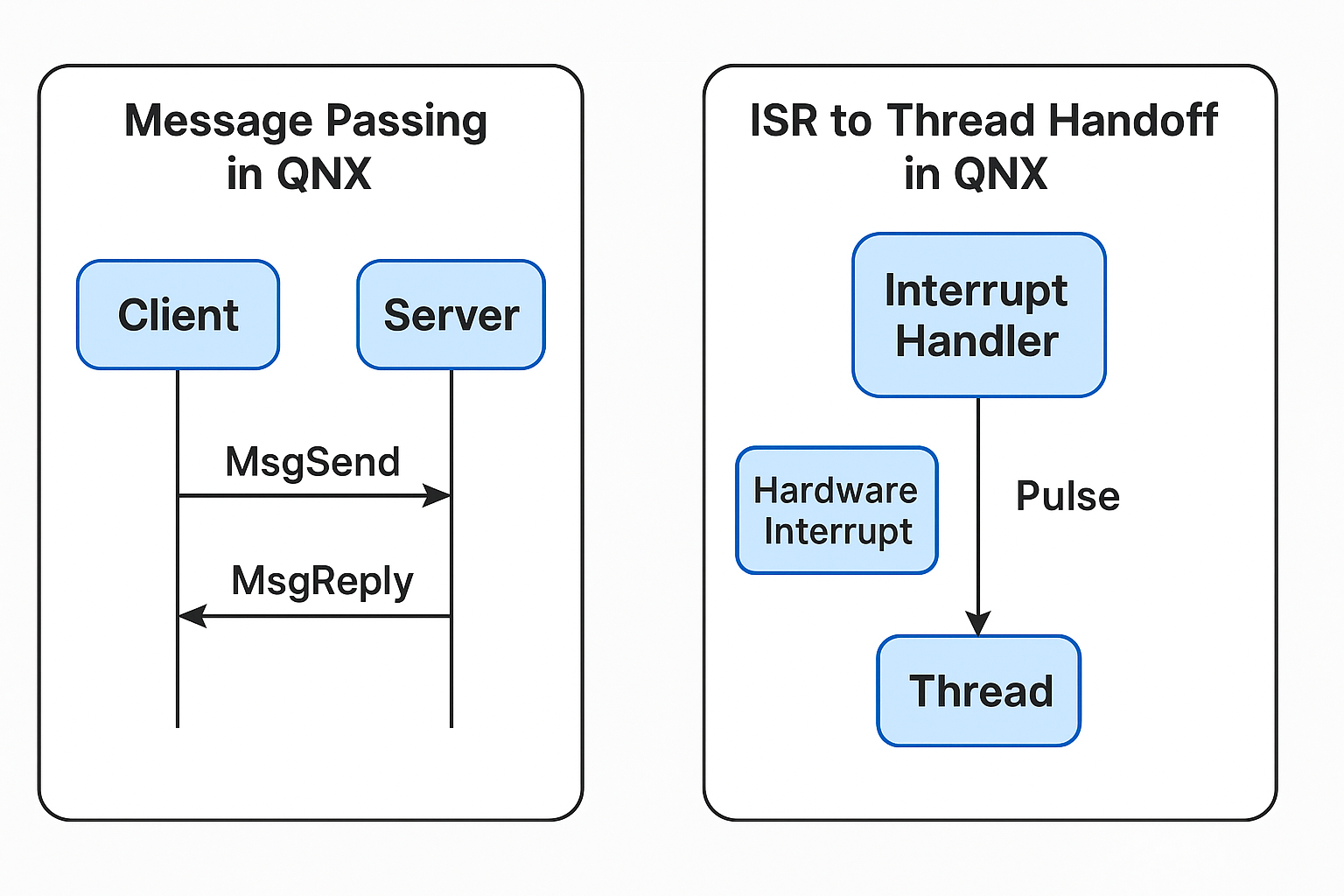
Example 1: Real-time Message Passing in QNX
QNX’s microkernel uses synchronous message passing (MsgSend, MsgReceive, MsgReply) for interprocess communication (IPC), ensuring predictable and real-time-safe data exchange.
Goal:
A client sends sensor data to a server (e.g., a data logger) using QNX message passing.
Server Code (real-time receiver):
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/neutrino.h>
#include <sys/dispatch.h>
typedef struct {
int data;
} message_t;
int main() {
name_attach_t* attach;
message_t msg;
int rcvid;
attach = name_attach(NULL, "SensorServer", 0); // Register name
if (attach == NULL) {
perror("name_attach failed");
exit(1);
}
printf("Server running, waiting for messages...\n");
while (1) {
rcvid = MsgReceive(attach->chid, &msg, sizeof(msg), NULL);
if (rcvid == -1) {
perror("MsgReceive failed");
continue;
}
printf("Received data: %d\n", msg.data);
MsgReply(rcvid, 0, NULL, 0); // Acknowledge
}
name_detach(attach, 0);
return 0;
}
Client Code:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/neutrino.h>
typedef struct {
int data;
} message_t;
int main() {
int coid;
message_t msg = { .data = 42 };
coid = name_open("SensorServer", 0); // Connect to server
if (coid == -1) {
perror("name_open failed");
exit(1);
}
MsgSend(coid, &msg, sizeof(msg), NULL, 0); // Send data
printf("Message sent!\n");
name_close(coid);
return 0;
}
Real-Time Note:
MsgSend()blocks the sender until the server replies—synchronous and deterministic.- This avoids race conditions and queues, making it real-time safe.
Example 2: Real-Time Interrupt Handling in QNX
Let’s simulate how you’d handle a hardware interrupt (like a GPIO pin going high) using a pulse message from ISR to a thread.
High-level Steps:
- Register an ISR using
InterruptAttach(). - In ISR, trigger a pulse to a real-time thread.
- The thread handles actual processing (interrupt thread, or i-thread).
ISR Handler (simplified simulation):
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/neutrino.h>
#include <sys/dispatch.h>
#include <signal.h>
#define INTERRUPT_CODE _PULSE_CODE_MINAVAIL
struct sigevent event;
const struct sigevent* isr_handler(void* arg, int id) {
return &event; // Send pulse
}
int main() {
int chid = ChannelCreate(0);
struct _pulse pulse;
SIGEV_PULSE_INIT(&event, NULL, SIGEV_PULSE_PRIO_INHERIT, INTERRUPT_CODE, 0);
int irq = 5; // Example IRQ number
InterruptAttach(irq, isr_handler, NULL, 0, 0);
printf("Waiting for pulses...\n");
while (1) {
if (MsgReceive(chid, &pulse, sizeof(pulse), NULL) == 0) {
if (pulse.code == INTERRUPT_CODE) {
printf("Interrupt received! Handling in thread.\n");
}
}
}
return 0;
}
Real-Time Note:
- The actual ISR (
isr_handler) only returns a pulse event (non-blocking and very fast). - The thread (main) receives the pulse and handles work at a deterministic priority level.
Summary
| Feature | Benefit in QNX RTOS |
|---|---|
MsgSend/Receive | Fast, synchronous, real-time-safe IPC |
InterruptAttach() | Minimal ISR, offloaded to thread via pulse |
SCHED_FIFO threads | Deterministic thread scheduling |
Mr. Raj Kumar is a highly experienced Technical Content Engineer with 7 years of dedicated expertise in the intricate field of embedded systems. At Embedded Prep, Raj is at the forefront of creating and curating high-quality technical content designed to educate and empower aspiring and seasoned professionals in the embedded domain.
Throughout his career, Raj has honed a unique skill set that bridges the gap between deep technical understanding and effective communication. His work encompasses a wide range of educational materials, including in-depth tutorials, practical guides, course modules, and insightful articles focused on embedded hardware and software solutions. He possesses a strong grasp of embedded architectures, microcontrollers, real-time operating systems (RTOS), firmware development, and various communication protocols relevant to the embedded industry.
Raj is adept at collaborating closely with subject matter experts, engineers, and instructional designers to ensure the accuracy, completeness, and pedagogical effectiveness of the content. His meticulous attention to detail and commitment to clarity are instrumental in transforming complex embedded concepts into easily digestible and engaging learning experiences. At Embedded Prep, he plays a crucial role in building a robust knowledge base that helps learners master the complexities of embedded technologies.

Leave a Reply