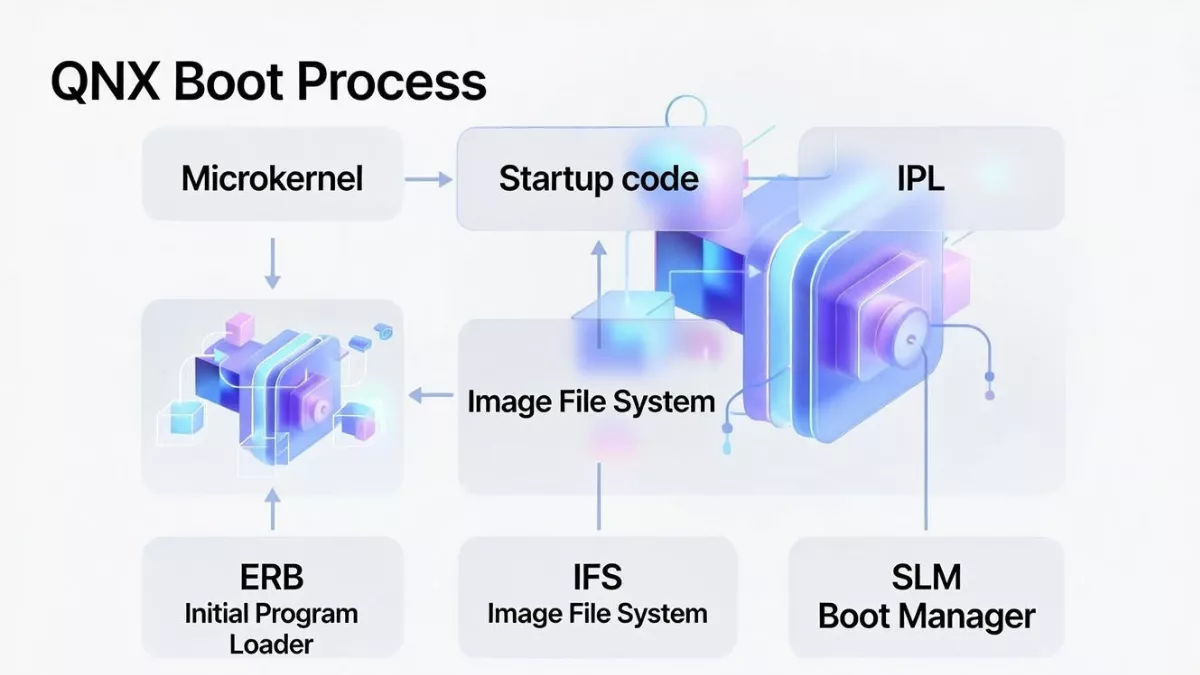
1. Process and Thread Management in QNX (Overview)
QNX is a real-time, microkernel-based operating system, designed for deterministic and high-reliability environments like automotive, medical, and industrial systems.
In QNX:
- A process is a protected memory space that can have one or more threads of execution.
- The microkernel handles thread-level scheduling, not process-level, making threads the core unit of execution.
QNX uses:
- Preemptive multitasking
- Priority-based scheduling
- POSIX-compliant APIs for thread/process management
2. How Threads are Managed in QNX
In QNX, threads are managed directly by the microkernel, and they are:
- The basic unit of CPU execution
- Associated with a process’s address space
- Managed with thread control blocks (TCBs) in the kernel
Thread States in QNX:
- READY
- RUNNING
- BLOCKED (on I/O, synchronization, or time delay)
- DEAD
Thread Attributes:
- Priority
- Scheduling policy
- Stack size
- CPU affinity
Threads are managed via:
pthread_create(),pthread_join(),pthread_cancel()sched_setscheduler(),sched_getscheduler()- Kernel-level calls for priority and state management
3. Thread Scheduling Policies in QNX
QNX supports several POSIX-compliant thread scheduling policies:
| Policy | Description |
|---|---|
SCHED_FIFO | First-In-First-Out; real-time threads of same priority execute in arrival order. No timeslice. |
SCHED_RR | Round-Robin; real-time threads with same priority take turns based on a timeslice. |
SCHED_OTHER | Default non-real-time policy. Time-sharing, dynamic priority changes. |
SCHED_SPORADIC | For periodic tasks with hard deadlines. Maintains CPU usage within a defined budget. |
You set scheduling policies with pthread_attr_setschedpolicy() and set thread priorities with pthread_attr_setschedparam().
4. Priority Inheritance and Ceiling Protocols in QNX
QNX provides real-time synchronization protocols to avoid priority inversion — a situation where a low-priority thread holds a resource needed by a high-priority thread.
A. Priority Inheritance Protocol
- When a low-priority thread holds a mutex and a high-priority thread blocks on it, the kernel temporarily raises the low-priority thread’s priority to match the high-priority thread.
- Once the mutex is released, the thread’s priority returns to its original value.
Usage:
pthread_mutexattr_t attr;
pthread_mutexattr_init(&attr);
pthread_mutexattr_setprotocol(&attr, PTHREAD_PRIO_INHERIT);
pthread_mutex_t mutex;
pthread_mutex_init(&mutex, &attr);
B. Priority Ceiling Protocol
- Each mutex is assigned a priority ceiling (the highest priority of any thread that will lock it).
- When a thread locks the mutex, its priority is immediately raised to the ceiling.
- Prevents deadlocks and priority inversion.
Usage:
pthread_mutexattr_t attr;
pthread_mutexattr_init(&attr);
pthread_mutexattr_setprotocol(&attr, PTHREAD_PRIO_PROTECT);
pthread_mutexattr_setprioceiling(&attr, 20);
pthread_mutex_t mutex;
pthread_mutex_init(&mutex, &attr);
5. Creating and Managing Processes and Threads in QNX
A. Process Creation
- Processes are created using
fork(),spawn()family, orexec()functions.
Example using spawn():
#include <spawn.h>
char *args[] = { "/bin/ls", NULL };
spawn(NULL, "/bin/ls", 0, NULL, args, NULL);
B. Thread Creation
- Threads are created using POSIX
pthreadAPI:
#include <pthread.h>
void* thread_func(void* arg) {
// Your thread code
return NULL;
}
int main() {
pthread_t tid;
pthread_create(&tid, NULL, thread_func, NULL);
pthread_join(tid, NULL);
return 0;
}
Thread attributes (like priority, stack size) can be set using pthread_attr_t.
C. Thread Priority Management
#include <sched.h>
struct sched_param param;
param.sched_priority = 10;
pthread_setschedparam(tid, SCHED_RR, ¶m);
6. Difference Between Process and Thread in QNX
| Aspect | Process | Thread |
|---|---|---|
| Memory Space | Separate for each process | Shared within the same process |
| Overhead | Higher | Lower |
| Communication | Needs IPC (Message Passing) | Easier using shared variables |
| Scheduling | Not scheduled individually | Scheduled by microkernel |
| Crash Isolation | One process crash won’t affect others | One thread crash can affect others |
| Creation API | spawn(), fork(), exec() | pthread_create() |
Summary
- Threads are the primary schedulable unit in QNX.
- QNX supports real-time scheduling (FIFO, RR, Sporadic).
- Use priority inheritance or ceiling protocols to prevent priority inversion.
- Processes are isolated memory spaces; threads share memory and execute concurrently within a process.
- You create processes using
spawn()and threads usingpthread_create().
Practical C code examples for QNX that demonstrate:
- Creating a thread and setting its scheduling policy and priority
- Using a mutex with priority inheritance protocol
- Using a mutex with priority ceiling protocol
1. Thread Creation with Scheduling Policy and Priority
This example creates a thread with Round-Robin (SCHED_RR) scheduling and a priority of 10.
#include <pthread.h>
#include <sched.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
void* thread_function(void* arg) {
printf("Thread is running with priority = %d\n", sched_get_priority_max(SCHED_RR));
return NULL;
}
int main() {
pthread_t thread;
pthread_attr_t attr;
struct sched_param param;
// Initialize thread attributes
pthread_attr_init(&attr);
// Set scheduling policy to Round-Robin
pthread_attr_setschedpolicy(&attr, SCHED_RR);
// Set thread priority
param.sched_priority = 10;
pthread_attr_setschedparam(&attr, ¶m);
pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED);
// Create thread
if (pthread_create(&thread, &attr, thread_function, NULL) != 0) {
perror("Failed to create thread");
return 1;
}
pthread_join(thread, NULL);
return 0;
}
2. Mutex with Priority Inheritance
This ensures that if a lower-priority thread holds a mutex needed by a higher-priority thread, its priority is temporarily elevated.
#include <pthread.h>
#include <stdio.h>
#include <unistd.h>
pthread_mutex_t mutex;
void* low_priority_task(void* arg) {
pthread_mutex_lock(&mutex);
printf("Low-priority thread acquired the mutex\n");
sleep(3); // Simulate long processing
printf("Low-priority thread releasing the mutex\n");
pthread_mutex_unlock(&mutex);
return NULL;
}
void* high_priority_task(void* arg) {
sleep(1); // Ensure low-priority locks first
printf("High-priority thread trying to acquire mutex\n");
pthread_mutex_lock(&mutex);
printf("High-priority thread acquired the mutex\n");
pthread_mutex_unlock(&mutex);
return NULL;
}
int main() {
pthread_mutexattr_t attr;
pthread_mutexattr_init(&attr);
pthread_mutexattr_setprotocol(&attr, PTHREAD_PRIO_INHERIT);
pthread_mutex_init(&mutex, &attr);
pthread_t low, high;
pthread_create(&low, NULL, low_priority_task, NULL);
pthread_create(&high, NULL, high_priority_task, NULL);
pthread_join(low, NULL);
pthread_join(high, NULL);
return 0;
}
3. Mutex with Priority Ceiling
This raises the thread’s priority to the mutex ceiling as soon as it acquires the mutex.
#include <pthread.h>
#include <stdio.h>
#include <unistd.h>
pthread_mutex_t ceiling_mutex;
void* task(void* arg) {
pthread_mutex_lock(&ceiling_mutex);
printf("Thread entered critical section (priority elevated)\n");
sleep(2);
printf("Thread exiting critical section\n");
pthread_mutex_unlock(&ceiling_mutex);
return NULL;
}
int main() {
pthread_mutexattr_t attr;
pthread_mutexattr_init(&attr);
pthread_mutexattr_setprotocol(&attr, PTHREAD_PRIO_PROTECT);
pthread_mutexattr_setprioceiling(&attr, 15); // Set ceiling
pthread_mutex_init(&ceiling_mutex, &attr);
pthread_t t;
pthread_create(&t, NULL, task, NULL);
pthread_join(t, NULL);
return 0;
}
Tips:
- Always use
PTHREAD_EXPLICIT_SCHEDwhen assigning custom policies. - Thread priorities in QNX range typically from 1 (lowest) to 255 (highest).
- Use
sched_get_priority_min()andsched_get_priority_max()to verify valid priority ranges.
How to Debug & Verify Thread Priority and Mutex Behavior in QNX
1. Verify Thread Priorities at Runtime
You can verify thread scheduling attributes in two ways:
A. Programmatically (within your code)
Use pthread_getschedparam() to print the thread’s current scheduling policy and priority:
#include <pthread.h>
#include <sched.h>
#include <stdio.h>
void print_thread_info(pthread_t tid) {
int policy;
struct sched_param param;
if (pthread_getschedparam(tid, &policy, ¶m) == 0) {
printf("Thread Priority: %d\n", param.sched_priority);
printf("Scheduling Policy: %s\n",
policy == SCHED_FIFO ? "SCHED_FIFO" :
policy == SCHED_RR ? "SCHED_RR" :
policy == SCHED_OTHER ? "SCHED_OTHER" :
"UNKNOWN");
} else {
perror("pthread_getschedparam");
}
}
Call this inside or right after your thread function starts.
B. Using QNX ps and pidin utilities
Open a terminal or shell and use:
ps -t
Or to inspect details like priority:
pidin -p <PID> tid
This lists all threads under a process and their priority, state, and scheduling policy.
2. Verify Mutex Priority Protocol Behavior
A. Observe Inheritance or Ceiling Effects in Logs
Use printf() in your thread code to log:
- When mutex is acquired/released
- Which thread has the mutex
- Current thread priority before and after
For example, you might observe:
Low-priority thread acquired the mutex
High-priority thread trying to acquire mutex
Low-priority thread's priority temporarily raised!
This would confirm priority inheritance.
B. Use pidin to Check Thread Priority During Blocking
While the high-priority thread is blocked, run:
pidin -p <PID> tid
You should see the low-priority thread’s priority has been temporarily raised (for inheritance), or elevated to the ceiling (for ceiling protocol).
Example:
TID PRI STATE NAME
1 15 READY low_thread (priority raised to match ceiling/inheritance)
2 10 BLOCKED high_thread (waiting for mutex)
3. Helpful Tools for Debugging in QNX
| Tool | Use |
|---|---|
pidin | View process/thread/mutex state and scheduling |
ps | Basic process/thread info |
top | Real-time CPU and priority monitoring |
Momentics IDE | Graphical debugging and trace (if using QNX SDP) |
System Profiler | Shows exact thread execution timelines, blocking, priorities, etc. |
Summary
- Use
pthread_getschedparam()andpidinto inspect thread priority and policy. - Log thread actions to confirm correct mutex protocol behavior.
- Watch for temporary priority boosts (inheritance) or immediate elevation (ceiling).
- System Profiler (Momentics) is best for full trace and visualization.
Mr. Raj Kumar is a highly experienced Technical Content Engineer with 7 years of dedicated expertise in the intricate field of embedded systems. At Embedded Prep, Raj is at the forefront of creating and curating high-quality technical content designed to educate and empower aspiring and seasoned professionals in the embedded domain.
Throughout his career, Raj has honed a unique skill set that bridges the gap between deep technical understanding and effective communication. His work encompasses a wide range of educational materials, including in-depth tutorials, practical guides, course modules, and insightful articles focused on embedded hardware and software solutions. He possesses a strong grasp of embedded architectures, microcontrollers, real-time operating systems (RTOS), firmware development, and various communication protocols relevant to the embedded industry.
Raj is adept at collaborating closely with subject matter experts, engineers, and instructional designers to ensure the accuracy, completeness, and pedagogical effectiveness of the content. His meticulous attention to detail and commitment to clarity are instrumental in transforming complex embedded concepts into easily digestible and engaging learning experiences. At Embedded Prep, he plays a crucial role in building a robust knowledge base that helps learners master the complexities of embedded technologies.