Learn what Priority Inversion is in an RTOS, why it causes problems in real-time systems, and how techniques like priority inheritance and priority ceiling protocols can fix it.
Priority Inversion : When working with Real-Time Operating Systems (RTOS), one important concept that often confuses beginners is priority inversion. If you are learning about task scheduling, semaphores, or resource sharing, understanding this issue is crucial. In this article, we’ll break down what priority inversion is, why it happens, and how it can be solved in RTOS systems.
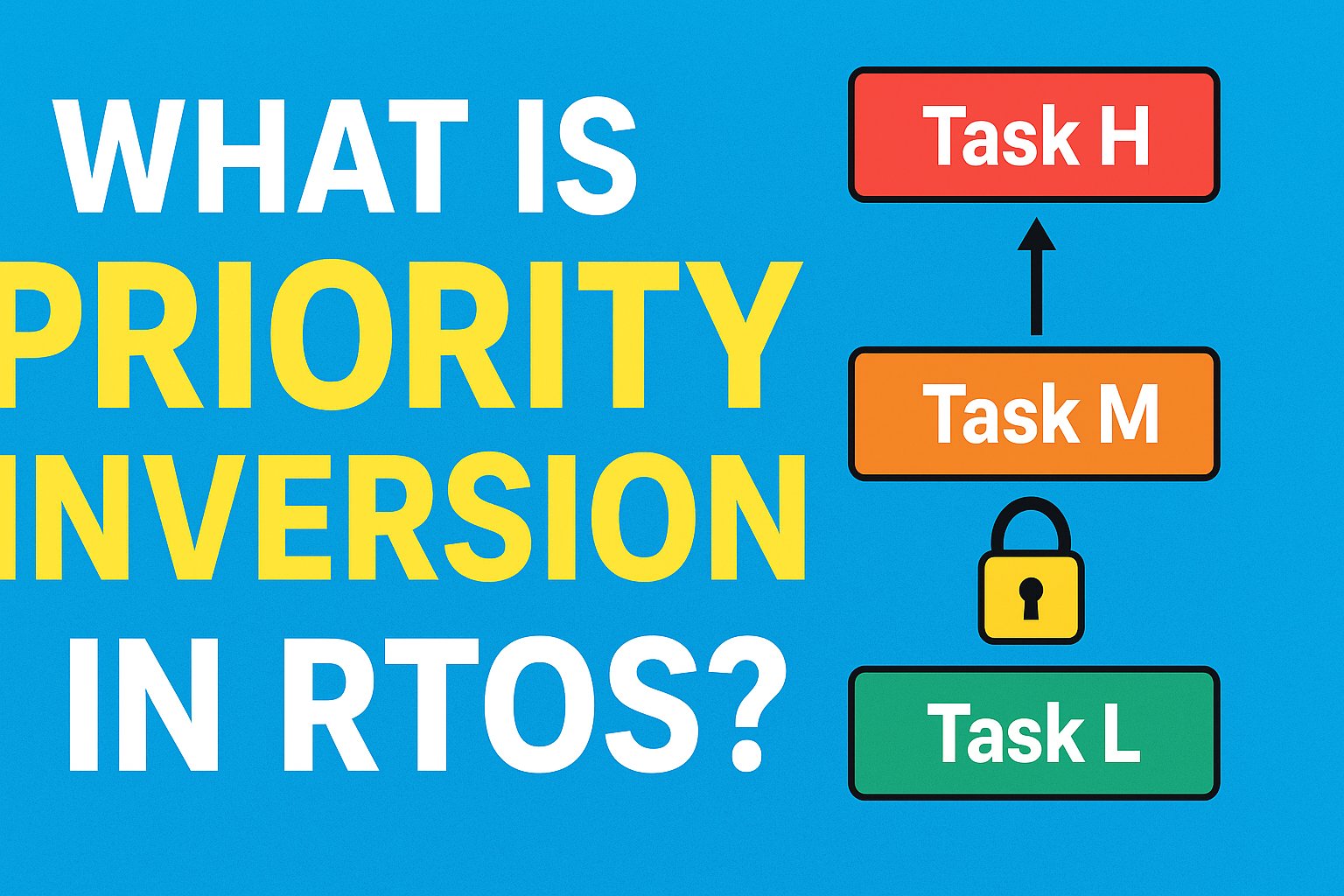
What is Priority Inversion?
Priority inversion is a problem that occurs in multitasking systems when a high-priority task is forced to wait because a lower-priority task is holding a resource (like a mutex or semaphore) that the high-priority task needs.
Instead of the high-priority task running immediately (as expected in an RTOS), it gets “inverted” and ends up waiting, sometimes even longer than medium-priority tasks. This can lead to performance issues, missed deadlines, and unexpected system behavior.
Example of Priority Inversion
Imagine you have three tasks in an RTOS:
- Task H (High priority) → Needs a shared resource.
- Task L (Low priority) → Currently holding the resource.
- Task M (Medium priority) → Independent task that doesn’t need the resource.
Here’s what happens:
- Task L locks the resource.
- Task H tries to access the same resource, but it is locked by Task L, so Task H must wait.
- Before Task L can finish, Task M starts running (since it has higher priority than Task L).
- Now, Task H (which is the most critical task) is waiting indirectly because Task M keeps running, delaying Task L from releasing the resource.
This situation is called priority inversion.
Why is Priority Inversion a Problem?
- Missed deadlines: In real-time systems, tasks often have strict timing requirements.
- Unpredictable behavior: The system no longer behaves as expected based on priority rules.
- Reduced reliability: Critical applications (like automotive, aerospace, or medical devices) may fail due to delays.
How Can Priority Inversion Be Mitigated?
RTOS designers use specific techniques to solve priority inversion. The most common solutions are:
1. Priority Inheritance Protocol
When a low-priority task holds a resource needed by a high-priority task, the RTOS temporarily boosts the priority of the low-priority task to match the high-priority task.
- This ensures the low-priority task quickly finishes and releases the resource.
- After releasing, its priority is restored.
2. Priority Ceiling Protocol
In this method, each resource is assigned a priority ceiling (the highest priority of any task that may use it).
- When a task locks the resource, it temporarily inherits the ceiling priority.
- This prevents medium-priority tasks from preempting and causing delays.
3. Careful Task Design
- Keep critical sections (where resources are locked) as short as possible.
- Avoid unnecessary resource sharing between high and low-priority tasks.
- Use appropriate scheduling policies in the RTOS.
Real-World Example of Priority Inversion
NASA’s Mars Pathfinder mission famously experienced a system reset issue due to priority inversion. The problem was solved by enabling priority inheritance, which prevented further system failures.
C++ Example using std::thread and std::mutex
#include
#include
#include
#include
std::mutex resource;
void lowPriorityTask() {
std::cout << "Low-priority task started and locking resource\n";
resource.lock(); // Lock resource
std::this_thread::sleep_for(std::chrono::seconds(5)); // Simulate long work
resource.unlock();
std::cout << "Low-priority task finished\n";
}
void mediumPriorityTask() {
std::this_thread::sleep_for(std::chrono::milliseconds(500)); // Let low task start first
std::cout << "Medium-priority task running\n";
std::this_thread::sleep_for(std::chrono::seconds(2)); // Simulate work
std::cout << "Medium-priority task finished\n";
}
void highPriorityTask() {
std::this_thread::sleep_for(std::chrono::milliseconds(1000)); // Start after low task
std::cout << "High-priority task trying to lock resource\n";
resource.lock(); // Blocked here because low-priority holds it
std::cout << "High-priority task got resource!\n";
resource.unlock();
}
int main() {
std::thread t1(lowPriorityTask);
std::thread t2(mediumPriorityTask);
std::thread t3(highPriorityTask);
t1.join();
t2.join();
t3.join();
return 0;
} Output explanation:
- Low-priority task locks the resource.
- High-priority task wants it but is blocked.
- Medium-priority task runs and delays Low-priority task from finishing → High-priority task is indirectly delayed.
This demonstrates priority inversion.
C++ Simulation with Priority Inheritance (Conceptual)
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
SemaphoreHandle_t xMutex;
void vLowPriorityTask(void *pvParameters) {
xSemaphoreTake(xMutex, portMAX_DELAY);
// Simulate work
vTaskDelay(pdMS_TO_TICKS(5000));
xSemaphoreGive(xMutex);
vTaskDelete(NULL);
}
void vMediumPriorityTask(void *pvParameters) {
vTaskDelay(pdMS_TO_TICKS(500));
// Work that can preempt low priority
vTaskDelay(pdMS_TO_TICKS(2000));
vTaskDelete(NULL);
}
void vHighPriorityTask(void *pvParameters) {
vTaskDelay(pdMS_TO_TICKS(1000));
xSemaphoreTake(xMutex, portMAX_DELAY); // Will inherit low-priority task priority
xSemaphoreGive(xMutex);
vTaskDelete(NULL);
}
int main() {
xMutex = xSemaphoreCreateMutex(); // FreeRTOS mutex with priority inheritance
xTaskCreate(vLowPriorityTask, "Low", 1000, NULL, 1, NULL);
xTaskCreate(vMediumPriorityTask, "Medium", 1000, NULL, 2, NULL);
xTaskCreate(vHighPriorityTask, "High", 1000, NULL, 3, NULL);
vTaskStartScheduler();
return 0;
}Here, FreeRTOS automatically boosts the low-priority task holding the mutex to the priority of the high-priority task if it tries to acquire it. This avoids priority inversion.
Conclusion
Priority inversion is an important concept every embedded systems or RTOS developer should understand. It happens when a high-priority task is blocked by a lower-priority task holding a resource. The good news is that RTOS kernels offer mechanisms like priority inheritance and priority ceiling protocols to solve this issue.
By keeping critical sections short and designing tasks carefully, developers can prevent priority inversion and ensure their RTOS applications run smoothly and reliably.
FAQ of Priority Inversion
1.What is priority inversion in RTOS?
Ans: Priority inversion occurs when a high-priority task is blocked because a low-priority task is holding a resource, while medium-priority tasks keep running.
2.Why is priority inversion dangerous?
Ans: It can cause missed deadlines, unpredictable system behavior, and failures in critical real-time systems like automotive, aerospace, and medical devices.
3.How can priority inversion be prevented?
Ans: Common solutions include priority inheritance protocol, priority ceiling protocol, and designing tasks so that resource locking is minimal.
4.What is the difference between priority inheritance and priority ceiling?
Ans:
Priority inheritance temporarily raises the priority of the low-priority task holding a resource.
Priority ceiling assigns the resource the highest priority of any task that might use it, preventing medium-priority interference.
5.Can you give a real-world example of priority inversion?
Ans: Yes, NASA’s Mars Pathfinder mission faced a system reset issue due to priority inversion, which was fixed using the priority inheritance mechanism.
Priority Inversion Interview Questions
Basic Level
- What is priority inversion in an RTOS?
- Explain with an example how a high-priority task can get blocked by a low-priority task.
- Why is priority inversion a problem in real-time systems?
- What is the difference between a high-priority and low-priority task in an RTOS context?
Intermediate Level
- How does the priority inheritance protocol help in mitigating priority inversion?
- What is the priority ceiling protocol and how is it different from priority inheritance?
- Can priority inversion occur if there are no shared resources between tasks? Why or why not?
- How can careful task design help prevent priority inversion?
Advanced Level
- Explain a real-world example where priority inversion caused a system failure.
- If a high-priority task is blocked due to priority inversion, how can you identify it using RTOS debugging tools?
- What are the trade-offs of implementing priority inheritance in an RTOS?
- How would you handle multiple resources being used by tasks of different priorities to avoid priority inversion?
You can also Visit other tutorials of Embedded Prep
- Multithreading in C++
- Multithreading Interview Questions
- Multithreading in Operating System
- Multithreading in Java
- POSIX Threads pthread Beginner’s Guide in C/C++
- Speed Up Code using Multithreading
- Limitations of Multithreading
- Common Issues in Multithreading
- Multithreading Program with One Thread for Addition and One for Multiplication
- Advantage of Multithreading
- Disadvantages of Multithreading
- Applications of Multithreading: How Multithreading Makes Modern Software Faster and Smarter”
- Master CAN Bus Interview Questions 2025
- What Does CAN Stand For in CAN Bus?
- CAN Bus Message Filtering Explained
- CAN Bus Communication Between Nodes With Different Bit Rates
- How Does CAN Bus Handle Message Collisions
- Message Priority Using Identifiers in CAN Protocol
Mr. Raj Kumar is a highly experienced Technical Content Engineer with 7 years of dedicated expertise in the intricate field of embedded systems. At Embedded Prep, Raj is at the forefront of creating and curating high-quality technical content designed to educate and empower aspiring and seasoned professionals in the embedded domain.
Throughout his career, Raj has honed a unique skill set that bridges the gap between deep technical understanding and effective communication. His work encompasses a wide range of educational materials, including in-depth tutorials, practical guides, course modules, and insightful articles focused on embedded hardware and software solutions. He possesses a strong grasp of embedded architectures, microcontrollers, real-time operating systems (RTOS), firmware development, and various communication protocols relevant to the embedded industry.
Raj is adept at collaborating closely with subject matter experts, engineers, and instructional designers to ensure the accuracy, completeness, and pedagogical effectiveness of the content. His meticulous attention to detail and commitment to clarity are instrumental in transforming complex embedded concepts into easily digestible and engaging learning experiences. At Embedded Prep, he plays a crucial role in building a robust knowledge base that helps learners master the complexities of embedded technologies.